| 排放控制区巡检作业中异质无人机与无人艇协同调度的双层规划 |
| |
| 引用本文: | 胡志华, 牛雅凡. 排放控制区巡检作业中异质无人机与无人艇协同调度的双层规划[J]. 华南师范大学学报(自然科学版), 2024, 56(6): 65-75. DOI: 10.6054/j.jscnun.2024078 |
| |
| 作者姓名: | 胡志华 牛雅凡 |
| |
| 作者单位: | 上海海事大学物流研究中心, 上海 201306 |
| |
| 基金项目: | 国家自然科学基金项目(71871136);上海市自然科学基金面上项目(23ZR1426500) |
| |
| 摘 要: | 
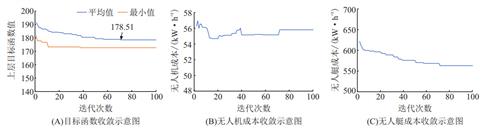
为提高无人机巡检船舶尾气排放效率,考虑了异质无人机与无人艇协同调度路径规划问题,采用双层规划模型解决无人机与无人艇配置和路径优化问题。上层模型利用改进的自适应模拟退火算法求出无人机与无人艇配置方案;下层模型以最短无人机飞行总时间为目标,结合无人机、无人艇和船舶实时动态性特征,利用改进的遗传算法求出无人机检测序列与飞行路径和无人艇航行路径。
算例实验结果表明:异质无人机与无人艇协同调度相较于固定配置下同质无人机与无人艇在飞行总时间上平均减少24.98%,无人机成本平均减少23.57%,无人艇成本平均减少42.20%;无人机速度每提升15 km/h,飞行总时间平均减少23.02%,无人机成本平均增加26.45%;无人艇速度每提升5 km/h,无人艇成本平均增加37%。
|
| 关 键 词: | 无人机巡检 选址与路径优化 双层规划模型 改进模拟退火算法 改进遗传算法 |
| 收稿时间: | 2024-07-03 |
|
| 点击此处可从《华南师范大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《华南师范大学学报(自然科学版)》下载免费的PDF全文 |
|