| 基于可观性分析的GNSS/IMU/视觉融合定位算法 |
| |
| 作者姓名: | 刘伟 宋舜辉 夏新 陆逸适 刘昌盛 余卓平 |
| |
| 作者单位: | 1.同济大学 汽车学院,上海 201804;2.同济大学 新能源汽车工程中心,上海 201804;3.加州大学洛杉矶分校,美国 洛杉矶 90095;4.上海共迹科技有限公司,上海 201804;5.浙江大学 计算机科学与技术学院, 杭州 310027 |
| |
| 基金项目: | 国家重点研发计划政府间国际科技创新合作专项(2022YFE0117100);国家自然科学基金(51975414) |
| |
| 摘 要: | 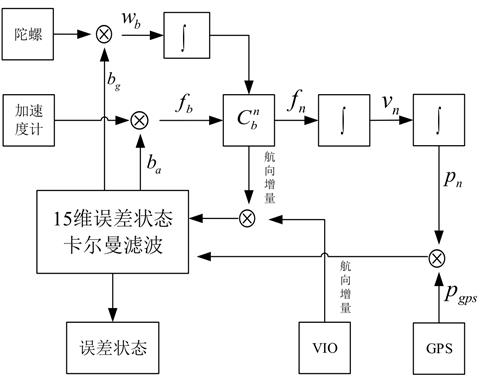
作为决策、规划和控制的基础,精确的位姿估计对于智能汽车极为重要。为提高车辆的位姿中的航向估计精度,本文提出一种基于可观性的全球导航卫星系统(GNSS)、惯性测量单元(IMU)的视觉融合定位算法。
首先,为分析GNSS/IMU组合定位误差状态的可观性,提出一种新的相对可观性分析方法,结果表明传统的GNSS/INS组合定位算法存在4个弱可观状态;随后,基于相对可观性理论,利用视觉惯性里程计估计的相对航向角,提出了一种基于可观性的融合定位算法;最后,实验验证了相对可观性分析的有效性,实验结果显示所提定位算法的最大航向误差为2.76°,航向误差RMS为1°,表明所提算法可以有效提高弱可观状态下车辆的航向估计精度。

|
| 关 键 词: | 融合定位 全球导航卫星系统(GNSS) 惯性测量单元(IMU) 视觉惯性里程计 可观性 |
| 收稿时间: | 2023-09-28 |
|
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《同济大学学报(自然科学版)》下载全文 |
|