|
|||||
|
|
| 考虑车辆运动预测的 |
|
| 作者姓名: | 韦民祥 郑玲 杨威 |
| 作者单位: | 重庆大学 机械传动国家重点实验室,重庆 400044 |
| 基金项目: | 国家自然科学基金资助项目(51875061)。 |
| 摘 要: | 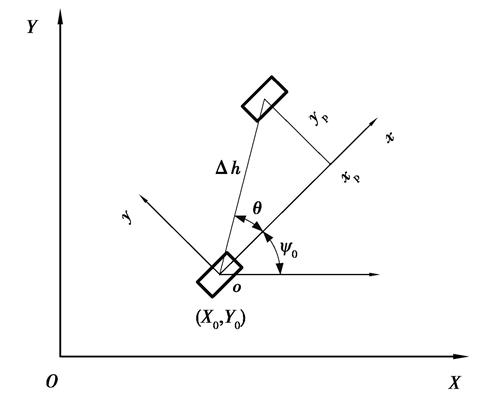 针对自动紧急制动(autonomous emergency braking,AEB)系统弯道适应性差及舒适性不佳的问题,提出了一种基于高斯过程运动预测,考虑变曲率弯道和制动舒适性的AEB系统控制策略。基于三次样条曲线建立行车道路模型,对前车进行定位,并计算相对曲线距离。 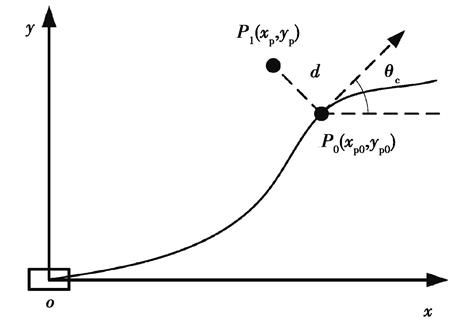 考虑车辆运动的非线性特性以及时间效应,建立基于高斯过程理论的车辆运动预测模型,设计了基于预测碰撞时间的分级预警与制动控制策略。联合仿真结果表明:提出的控制策略能够有效实现车辆的避撞,解决了AEB系统在复杂动态工况下的弯道适应性和制动舒适性问题。 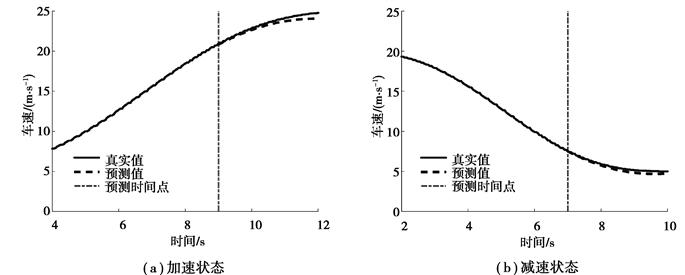 |
| 关 键 词: | 驾驶辅助系统 自动紧急制动 高斯过程 碰撞时间 |
| 收稿时间: | 2022-01-11 |
| 点击此处可从《重庆大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《重庆大学学报(自然科学版)》下载全文 | |