| 基于合作狩猎的捕食者-食饵系统定性分析与反馈控制 |
| |
| 引用本文: | 田源, 李幻梦. 基于合作狩猎的捕食者-食饵系统定性分析与反馈控制[J]. 信阳师范学院学报(自然科学版), 2023, 36(1): 22-27. DOI: 10.3969/j.issn.1003-0972.2023.01.004 |
| |
| 作者姓名: | 田源 李幻梦 |
| |
| 作者单位: | 大连海事大学 理学院, 辽宁 大连 116026 |
| |
| 基金项目: | 国家自然科学基金项目(11401068);;中央高校基本科研业务费(3132022199); |
| |
| 摘 要: | 
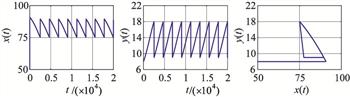
针对捕食系统中存在的合作狩猎现象,建立了一类具有合作狩猎的捕食者-食饵模型。为了避免特定区域捕食者数量过大导致短时间内食饵资源短缺问题,通过对捕食者群体数量进行限定及控制,建立了基于反馈控制的合作狩猎捕食者-食饵模型。首先,分析了连续系统的动力学行为,讨论了合作狩猎因子对系统正平衡态存在性及稳定性的影响;其次,利用后继函数方法及类Poincaré准则,讨论了反馈控制系统阶1周期解的存在性和稳定性;最后,利用MATLAB进行了数值模拟,对主要研究结果进行了验证。
|
| 关 键 词: | 合作狩猎 后继函数 类Poincaré 准则 阶1周期解 |
| 收稿时间: | 2021-10-26 |
| 修稿时间: | 2022-10-11 |
|
| 点击此处可从《信阳师范学院学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《信阳师范学院学报(自然科学版)》下载全文 |
|