| 一种面向动态环境下视觉同时定位和建图的图像预处理方法 |
| |
| 作者姓名: | 卓桂荣 卢守义 熊璐 |
| |
| 作者单位: | 1.同济大学 汽车学院,上海 201804;2.同济大学 新能源汽车工程中心,上海 201804 |
| |
| 基金项目: | 国家自然科学基金(52325212),国家重点研发计划(2022YFE0117100),中央高校基本科研业务费专项资金资助 |
| |
| 摘 要: | 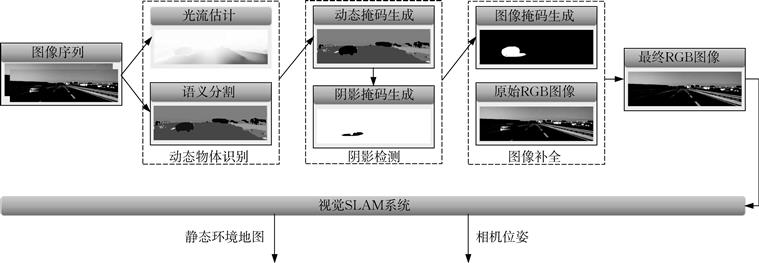
提出了一种用于动态环境下视觉同时定位和建图(SLAM)系统的图像预处理方法。该方法可以很容易地集成到现有视觉SLAM系统中,使其在高动态环境下能够稳定、准确和连续的工作。首先,提出了一种综合使用语义分割网络和光流估计网络的动态物体识别算法,鲁棒、准确地识别图像中潜在的动态物体。
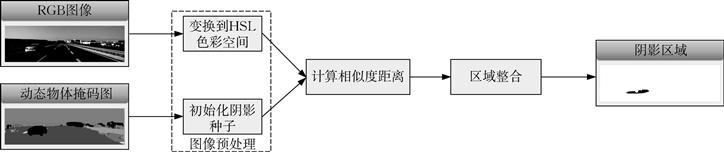
然后,为了检测与动态物体关联的阴影,提出了一种基于区域生长的阴影识别算法。最后,使用图像补全技术对剔除动态物体后的图像进行补全。将该图像预处理方法与双目ORB-SLAM2结合,并在KITTI数据集上进行了实验,实验表明所提出的图像预处理方法显著地提升了视觉SLAM系统的定位精度,并且图像预处理方法中的每一个模块都有着不可替代的作用。
|
| 关 键 词: | 图像预处理方法 视觉同时定位和建图 动态环境 定位 |
| 收稿时间: | 2023-03-05 |
|
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《同济大学学报(自然科学版)》下载全文 |
|