|
|||||
|
|
| 考虑车辆间交互作用的驾驶意图预测方法 | |
| 作者姓名: | 范佳琦 何钢磊 张羽翔 王玉海 |
| 作者单位: | 1.吉林大学 汽车仿真与控制国家重点实验室, 长春 130025;2.上汽乘用车有限公司 智能驾驶中心, 上海 201804 |
| 基金项目: | 国家自然科学基金重大项目(61790564);国家自然科学基金-中国汽车产业创新联合基金(U1864206) |
| 摘 要: | 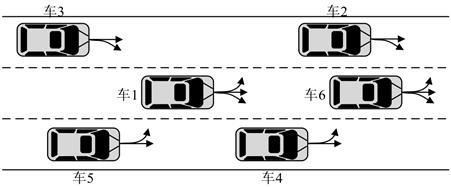 准确的意图预测可以帮助智能车辆更好地了解周围环境并做出更加安全的决策,从而提高自动驾驶的安全性,促进人机协同驾驶。为了对驾驶员未来的意图做出更加精准的预测,提出了一种交互式意图预测方法。首先,通过将隐马尔可夫模型(HMM)与高斯混合模型(GMM)相结合,在充分考虑周围场景信息后建立了行为识别模型,用于对当前的驾驶行为做出准确的判断。 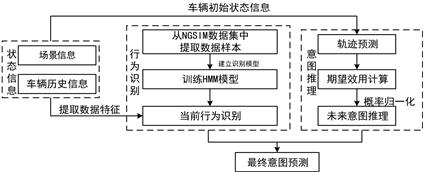 然后,考虑到交通场景复杂多变的特点,提出基于意图的轨迹预测方法规划出一条最佳的行驶轨迹,并采用最大期望效用理论对未来的驾驶行为进行推理。由于行为识别和意图推理模型综合考虑了交通态势的演变过程和车辆之间的交互作用,所以将两个模型得到的结果相结合可得到车辆最终预测出的驾驶意图。最后,在NGSIM数据集对所提出的方法进行验证,结果表明提出的行为识别模型能够提前0.2~0.3 s识别出车辆的换道意图,结合未来意图推理模型,能够更加准确地预测出车辆未来的驾驶行为,由此可提高车辆驾驶的安全性。 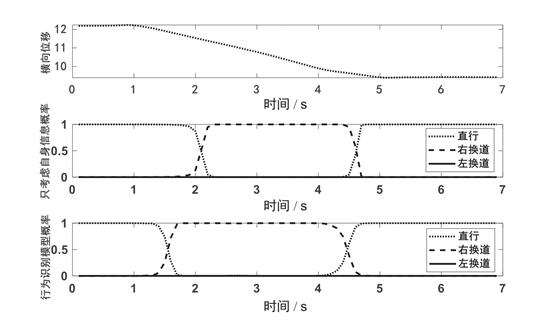 |
| 关 键 词: | 智能车辆 驾驶意图预测 车辆交互 换道场景 |
| 收稿时间: | 2021-08-20 |
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《同济大学学报(自然科学版)》下载全文 | |