|
|||||
|
|
| 一种任意起始位姿的连续曲率泊车路径在线规划方法 | |
| 作者姓名: | 刘美岑 陈慧 张书恺 |
| 作者单位: | 同济大学 汽车学院, 上海 201804 |
| 摘 要: |  针对目前泊车路径规划算法对起始位姿要求严格,且难以兼顾最终位姿精度、路径质量及计算效率等问题,提出了一种任意起始位姿的连续曲率路径在线规划方法。该方法将整个泊车路径规划分为库位内调整与入库过程两部分。库位内调整采用以最终位姿高精度与调整次数最少为目标函数的最优化方法进行逐段规划;入库过程采用连续曲率曲线组用于混合A*算法的状态节点扩展以直接生成无需后处理的可执行路径。 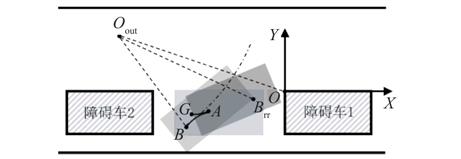 设计考虑路径的曲率变化与方向改变次数的估价函数;采用由路径几何形状特征点构建特征多边形的碰撞检测方法以提高计算效率。离线仿真与实车试验结果验证了该方法的有效性。 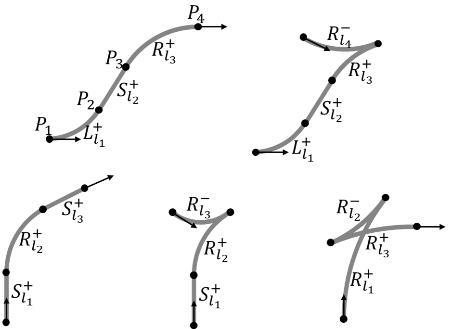 |
| 关 键 词: | 自动泊车 路径规划 连续曲率路径 混合A*算法 |
| 收稿时间: | 2021-08-16 |
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《同济大学学报(自然科学版)》下载全文 | |