|
|||||
|
|
| 紧急避撞路径规划及其跟踪驾驶员转向模型 | |
| 作者姓名: | 赵治国 胡昊锐 周良杰 王凯 冯建翔 |
| 作者单位: | 同济大学 汽车学院,上海 201804 |
| 基金项目: | 国家自然科学基金联合基金(Ul564208) |
| 摘 要: |  针对紧急避撞工况,提出并设计了一种紧急避撞路径规划方法和路径跟踪反馈预瞄驾驶员模型。首先,提出了一种基于Sigmoid曲线与物理约束的避撞路径规划方法,并建立融合最优曲率预瞄与闭环反馈转向修正的驾驶员模型以对所规划路径实现快速和精确跟踪。之后,搭建了CarSim+Simulink离线联合仿真平台,对避撞路径规划和路径跟踪反馈预瞄驾驶员模型的有效性进行了验证。  最后,基于自主改装的试验车辆,进行实车试验以验证所提出的路径规划方法及驾驶员模型的可行性与实时性。仿真及实车试验结果均表明,所规划的避撞路径和驾驶员模型可以控制车辆快速、安全地避让障碍物。 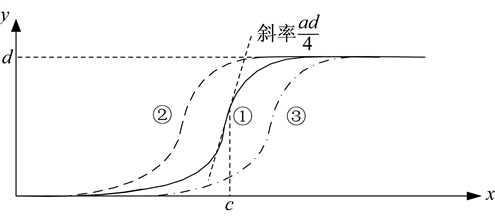 |
| 关 键 词: | 紧急避撞工况 路径规划 驾驶员模型 联合仿真 实车试验 |
| 收稿时间: | 2019-10-10 |
| 本文献已被 CNKI 等数据库收录! | |
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《同济大学学报(自然科学版)》下载全文 | |