| 基于改进粒子滤波算法的车速估计 |
| |
| 作者姓名: | 高彦 傅春耘 杨忠 杨官龙 |
| |
| 作者单位: | 重庆大学机械与运载工程学院,重庆 400044;重庆长安汽车股份有限公司,重庆 400023 |
| |
| 基金项目: | 重庆市自然科学基金资助项目(cstc2020jcyj-msxmX0664);中央高校基本科研业务费项目(2020CDJ-LHZZ-043)。 |
| |
| 摘 要: | 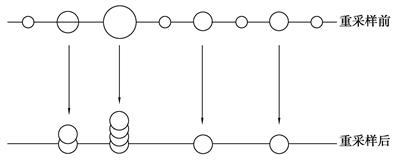
针对基于粒子滤波算法设计的车速估计器因提议分布与实际分布不一致导致粒子退化使估计误差变大的问题,提出了一种通过修正提议分布减弱粒子退化影响的改进粒子滤波车速估计器。首先,基于车辆运动学模型和传感器特性建立系统的状态转移方程和观测方程。然后,利用传感器测量值与粒子状态值的差值设计提议分布修正项对状态转移方程进行修正,并对过程噪声做自适应处理。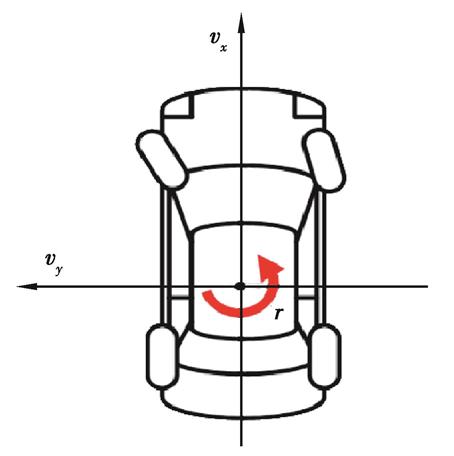
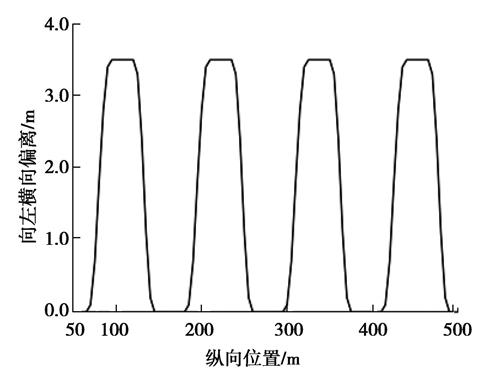
最后,利用CarSim-Simulink联合仿真平台在双移线工况和正弦转角输入工况下进行仿真验证。与自适应粒子滤波器相比,双移线工况下改进粒子滤波估计器产生的纵向速度估计值和侧向速度估计值的平均绝对误差分别减小了40.25%和55.71%;正弦转角输入工况下,改进粒子滤波估计器产生的纵向速度估计值和侧向速度估计值的平均绝对误差分别减小了47.00%和41.21%。
|
| 关 键 词: | 车速估计 粒子滤波 提议分布 |
| 收稿时间: | 2021-12-27 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《重庆大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《重庆大学学报(自然科学版)》下载全文 |
|