|
|||||
|
|
| 基于势场法的无人车局部动态避障路径规划算法 | |
| 引用本文: | 冯付勇, 魏超, 吕彦直, 何元浩. 基于GCN和QP的智能车辆换道决策规划[J]. 北京理工大学学报自然版, 2024, 44(8): 820-827. DOI: 10.15918/j.tbit1001-0645.2024.015 |
| 作者姓名: | 冯付勇 魏超 吕彦直 何元浩 |
| 作者单位: | 1.北京理工大学 机械与车辆学院,北京 100081;2.中兵智能创新研究院有限公司,北京 100072;3.群体自主与协同实验室,北京 100072;4.特种车辆设计制造集成技术全国重点实验室,北京 100081 |
| 基金项目: | 青年科学基金资助项目(52002026) |
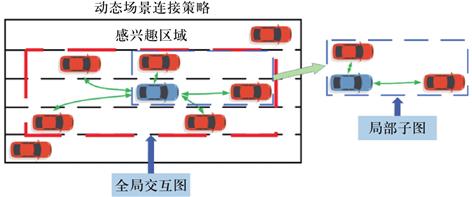
| 摘 要: | 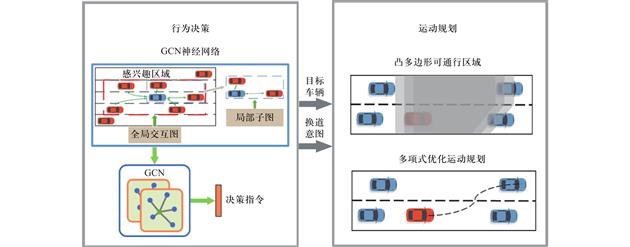 考虑动态驾驶场景下车辆间的交互影响,提出了一种基于图卷积网络和二次规划的智能车辆自主换道行为决策与运动规划方法. 首先将感兴趣区域进行分层建模,以图结构数据的形式对驾驶场景的全局和局部动态交互信息进行聚合,通过图卷积网络输出自车应采取的驾驶行为决策指令,然后与运动规划模块结合,基于局部子图划分可通行区域,构建并求解二次规划模型,得到满足运动学约束的无碰撞运动轨迹,最终完成无碰撞自主换道. 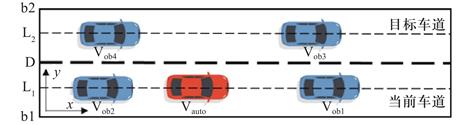 |
| 关 键 词: | 智能车辆 换道 行为决策 运动规划 图卷积网络 二次规划 |
| 收稿时间: | 2024-01-17 |
| 点击此处可从《北京理工大学学报》浏览原始摘要信息 | |
| 点击此处可从《北京理工大学学报》下载免费的PDF全文 | |