|
|||||
|
|
| 基于STM32单片机的六足巡检机器人设计研究 | |
| 作者姓名: | 徐琬婷 |
| 作者单位: | 芜湖职业技术学院汽车与航空学院 |
| 基金项目: | 安徽省高等学校省级质量工程项目“梅源技能大师工作室”(2022jnds062);芜湖职业技术学院校级质量工程项目“徐琬婷技术技能型工作室”(WDS20210901);芜湖职业技术学院校级创新团队“智能家电设计及生产过程数字化创新团队”(wzykytd202202)。 |
| 摘 要: | 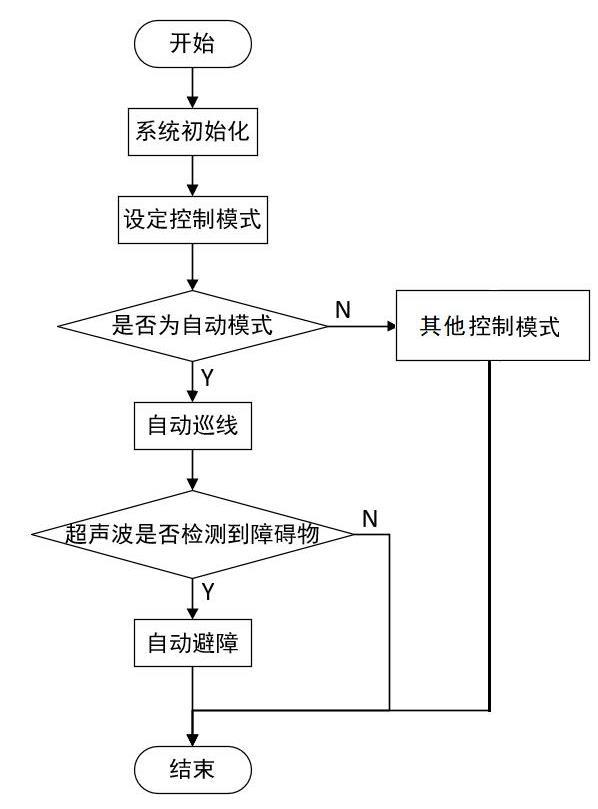 针对传统的巡检机器人运动局限在二维平面,不能从事复杂地形巡检工作的问题,系统采用了舵机控制的六足机器人的结构,并研究了STM32单片机控制六足机器人的方式,舵机控制器的控制调试原理、六足机器人的结构、硬件搭建和软件控制。为了让六足机器人具备避障、循迹、自动识物的功能,采用了超声波测距技术、蓝牙、WiFi无线传输技术、摄像头控制技术,并完成了相关的实验调试。  调试结果表明:六足巡检机器人控制范围为40 m以上,超声波测距精度为3 mm,舵机的控制精度为0.24°,可以很好地完成避障、循迹等任务,具有稳定性高、适应性强等优点,在实际应用中取得很好的成效,有着广泛的发展前景。  |
| 关 键 词: | STM32 六足机器人 巡检 |
| 收稿时间: | 2023-08-27 |
| 修稿时间: | 2023-10-21 |
| 点击此处可从《西昌学院学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《西昌学院学报(自然科学版)》下载全文 | |