|
|||||
|
|
| 基于神经网络算法的单框架控制力矩陀螺系统复合控制 | |
| 作者姓名: | 岳继光 何洪志 吴琛浩 赵雷 鲁明 来林 |
| 作者单位: | 1.同济大学 电子与信息工程学院,上海 201804;2.北京控制工程研究所,北京 100190 |
| 基金项目: | 国家重点研发计划项目 (No. 2018YFB1700902);中国空间技术研究院CAST创新基金项目(No. 2018CAST22) |
| 摘 要: |  提出一种基于双神经网络的前馈-反馈控制系统,采集单框架控制力矩陀螺系统在不同条件下的运行数据并使用卡尔曼滤波处理,基于神经网络构建了涵盖控制通道与干扰通道信息的虚拟广义被控对象模型,由此设计了神经网络前馈补偿器.实现了前馈补偿器-原反馈控制器的复合控制系统,减少了传统的前馈-反馈复合控制需要精确地获取干扰通道信息的约束. 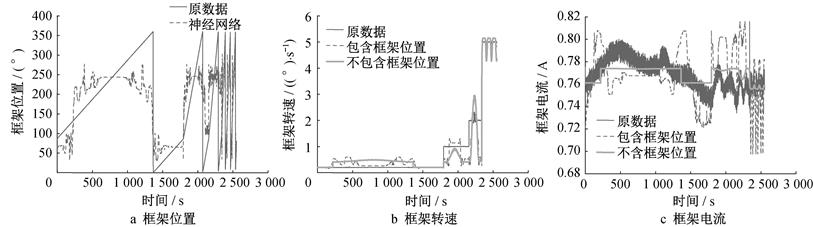 .. 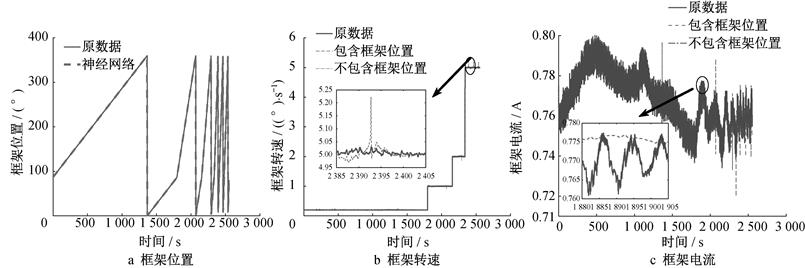 |
| 关 键 词: | 单框架控制力矩陀螺系统 神经网络 补偿控制 前馈-反馈控制 |
| 收稿时间: | 2020-11-20 |
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《同济大学学报(自然科学版)》下载免费的PDF全文 | |