|
|||||
|
|
| 考虑执行器时滞不确定的车辆编队网联巡航鲁棒模型预测控制 | |
| 作者姓名: | 张浩彬 张宁 徐利伟 王金湘 殷国栋 |
| 作者单位: | 东南大学 机械工程学院, 南京 211189 |
| 基金项目: | 国家自然科学基金(52072072);中央高校基本科研业务费专项资金资助项目(2242022R40070) |
| 摘 要: | 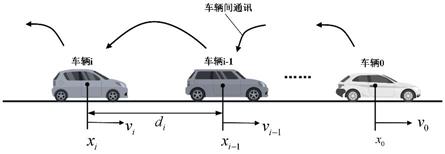 针对车辆编队中执行器时滞的不确定性,提出了一种基于鲁棒模型预测控制的新的车辆编队网联巡航控制方法。该方法能够实时处理编队安全约束,并兼顾车辆编队的弦稳定性与对执行器时滞的鲁棒性。首先,建立车辆编队的数学模型与网联巡航模型预测控制的控制架构,分析无约束条件下网联巡航模型预测控制的线性反馈特性。 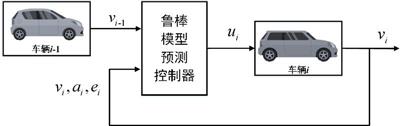 其次,基于  |
| 关 键 词: | 车辆编队 网联巡航控制 编队稳定性 鲁棒模型预测控制 |
| 收稿时间: | 2022-10-23 |
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 | |
| 点击此处可从《同济大学学报(自然科学版)》下载全文 | |