| 基于多约束随机模型预测控制的无人车运动规划与控制 |
| |
| 作者姓名: | 方培元 熊璐 冷搏 李拙人 曾德全 沈祖英 俞钟兢 刘登程 |
| |
| 作者单位: | 1.同济大学 汽车学院,上海 201804;2.华东交通大学 机电与车辆工程学院,南昌 330013;3.江西江铃集团新能源汽车有限公司,南昌 330013;4.同济大学 南昌智能新能源汽车研究院,南昌 330052 |
| |
| 基金项目: | 国家自然科学基金(52002284);上海市科委项目(21DZ1203802);同济大学南昌智能新能源汽车研究院前瞻课题资助项目(TPD-TC202110-09) |
| |
| 摘 要: | 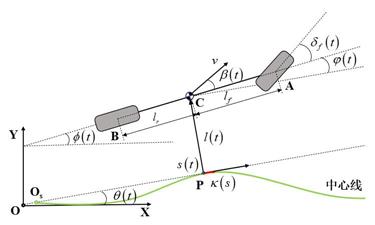
提出了一种基于随机模型预测控制的无人车运动规划方法。在道路坐标系下,采用质点运动模型和高斯分布对周围动态车辆的预测轨迹进行位置不确定性表征,并使用随机模型预测控制(SMPC)中的机会约束进行描述,以此建立车辆空间位置的约束。通过变步长求解方式获得基于运动学模型的初始控制序列。
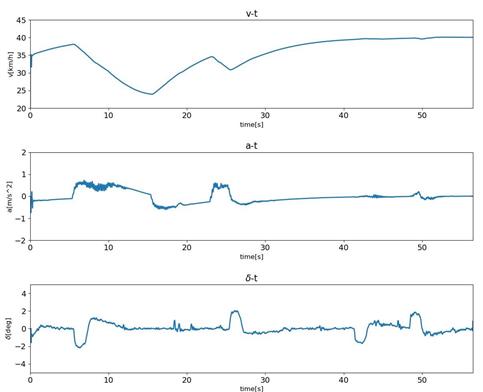
基于此初始解,考虑车辆动力学信息,引入基于横摆角速度和质心侧偏角关系的稳定性约束,求解最优控制量。在多种工况下,通过仿真试验验证了所提出方法的有效性和稳定性。
|
| 关 键 词: | 无人车 运动控制 随机模型预测控制 最优控制 |
| 收稿时间: | 2022-10-28 |
|
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《同济大学学报(自然科学版)》下载全文 |
|