| 改进前车状态预测的自适应巡航控制策略 |
| |
| 作者姓名: | 安婷玉 陈婷 高涛 李浩 涂辉招 |
| |
| 作者单位: | 1.长安大学 信息工程学院,陕西 西安 710064;2.同济大学 交通运输工程学院,上海 201804 |
| |
| 基金项目: | 国家重点研发计划(2019YFE0108300);国家自然科学基金(52172379,62001058);中央高校基本科研业务费项目(300102241201, 310833160212) |
| |
| 摘 要: | 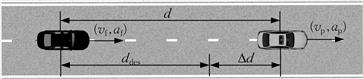
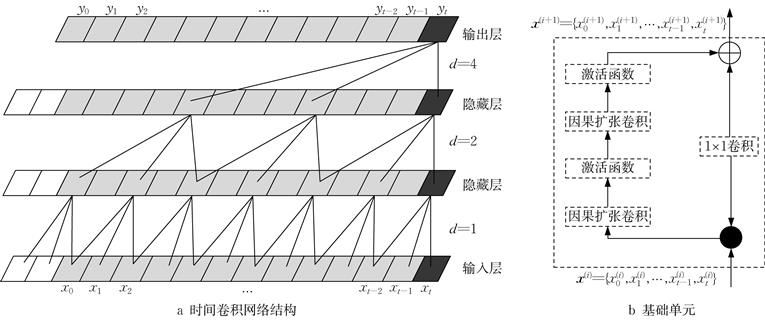
针对自适应巡航控制(ACC)系统中前车运动状态不确定性造成的模型失配和性能下降问题,提出一种改进前车状态预测的自适应巡航控制策略。首先,基于前车的历史速度和加速度信息利用时间卷积网络预测前车的未来加速度轨迹,然后将预测加速度作为扰动构建自适应巡航系统的预测控制模型,最后在Matlab—Carsim联合仿真平台进行仿真实验。
实验结果显示,时间卷积网络能够对车辆加速度取得较好的预测效果,且相对于传统MPC改进方法能够减小速度跟踪误差,并提高跟驰车辆对前车速度变化的响应速度。
|
| 关 键 词: | 自适应巡航控制系统 模型预测控制 时间卷积网络 加速度轨迹预测 |
| 收稿时间: | 2023-11-11 |
|
| 点击此处可从《同济大学学报(自然科学版)》浏览原始摘要信息 |
|
点击此处可从《同济大学学报(自然科学版)》下载免费的PDF全文 |
|